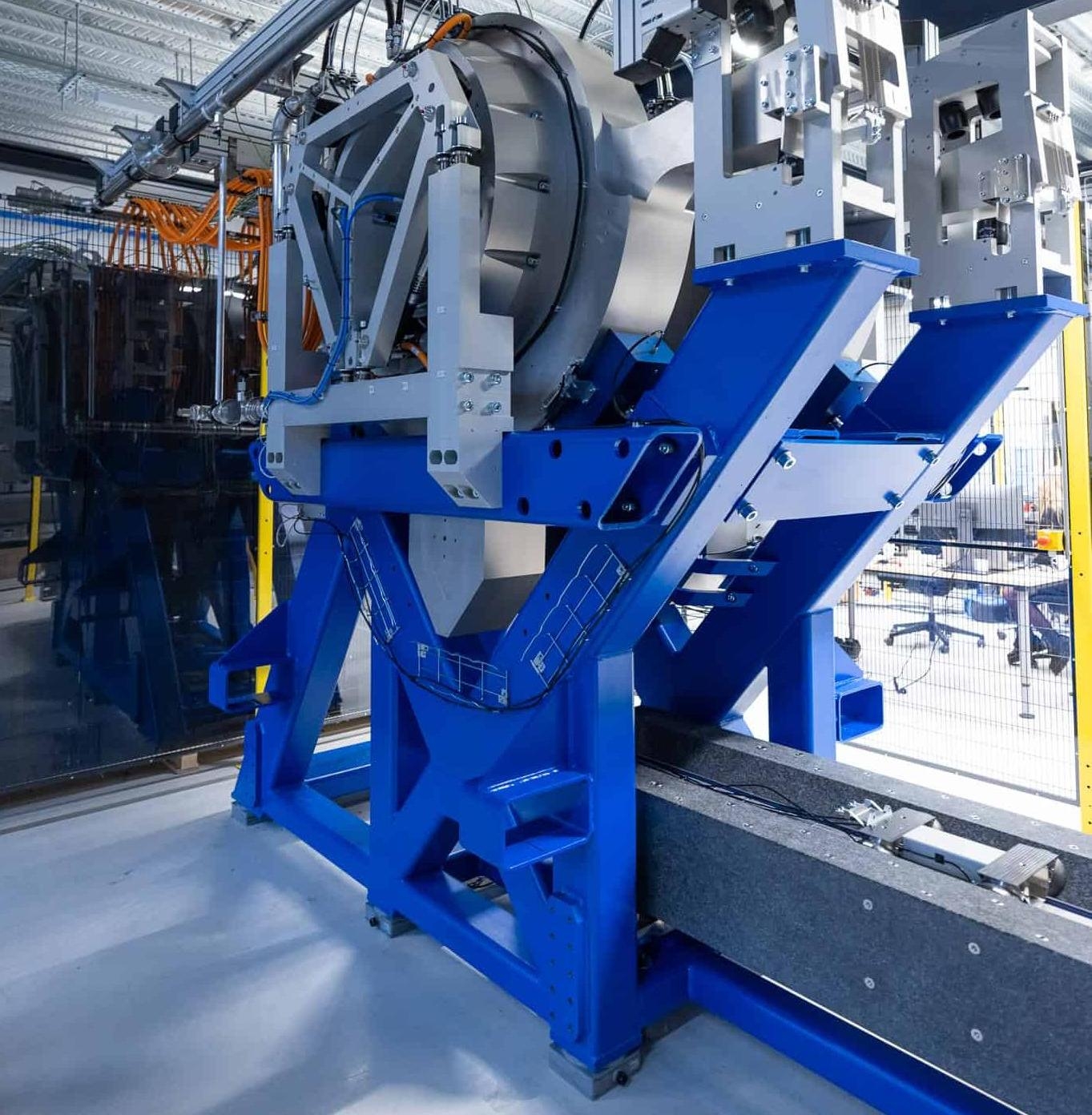
By designing those masses to generate opposing force contributions, we were able to cancel a large part of the frame excitation. In practical terms, that means better accuracy, less structural loading and far less disturbance to the surrounding environment.
Motion alone, however, is not enough. The system also has to move accurately. Because the setup uses multiple motors, multiple encoders and separate torque demands, a standard control solution was not sufficient. We therefore developed a custom control loop in Simulink. That gave us the flexibility to combine encoder feedback, filters and feed-forward control into a solution that could meet the required positioning performance. An important advantage was that we could simulate the system before ordering the first hardware components. That reduced integration risk and helped us speed up commissioning significantly.
Finally, the machine needed to remain useful beyond the first test cases. That's why we developed a custom TCP/IP interface that allows flexible profile input from the customer. Setpoints are checked against predefined rules, buffered, executed and logged together with sensor data. This enables long-duration and 24/7 operation while keeping the system open for future test scenarios.